 手機(jī)版
手機(jī)版 化工儀器網(wǎng)手機(jī)版
化工儀器網(wǎng)手機(jī)版
 化工儀器網(wǎng)小程序
化工儀器網(wǎng)小程序
 官方微信
官方微信 公眾號(hào):chem17
公眾號(hào):chem17
 掃碼關(guān)注視頻號(hào)
掃碼關(guān)注視頻號(hào)

驗(yàn)儀器設(shè)備有限公司")









1. 引言
高低溫交變?cè)囼?yàn)箱廣泛應(yīng)用于電子、汽車等行業(yè),用于模擬產(chǎn)品在溫度環(huán)境下的可靠性。溫度控制的精準(zhǔn)性和穩(wěn)定性直接影響測(cè)試結(jié)果的準(zhǔn)確性,而PID控制算法是實(shí)現(xiàn)高精度控溫的核心技術(shù)。本文將對(duì)PID算法在高低溫交變?cè)囼?yàn)箱中的應(yīng)用進(jìn)行深入分析,探討其優(yōu)化方法及實(shí)際效果。
2. PID控制算法基本原理
PID(Proportional-Integral-Derivative,比例-積分-微分)控制是一種經(jīng)典閉環(huán)控制策略,其輸出由三部分構(gòu)成:
比例(P):根據(jù)當(dāng)前誤差調(diào)整控制量,快速響應(yīng)但可能產(chǎn)生穩(wěn)態(tài)誤差。
積分(I):消除歷史累積誤差,提高系統(tǒng)穩(wěn)態(tài)精度,但響應(yīng)較慢。
微分(D):預(yù)測(cè)誤差變化趨勢(shì),抑制超調(diào),增強(qiáng)系統(tǒng)穩(wěn)定性。
PID控制公式為:
其中, 為控制輸出, 為溫度誤差,、、 分別為比例、積分、微分系數(shù)。

3. PID算法在高低溫試驗(yàn)箱中的應(yīng)用
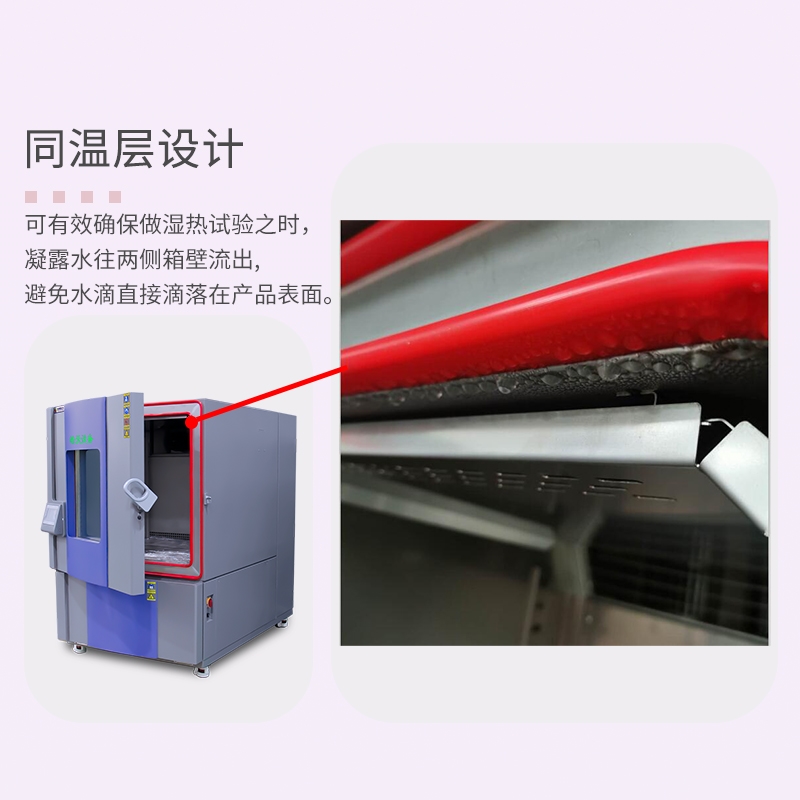
高低溫交變?cè)囼?yàn)箱的溫度控制具有非線性、大滯后等特點(diǎn),傳統(tǒng)PID需結(jié)合試驗(yàn)箱特性進(jìn)行優(yōu)化:
溫度上升階段:P參數(shù)主導(dǎo),快速加熱;I參數(shù)防止過(guò)沖。
溫度保持階段:I參數(shù)消除穩(wěn)態(tài)誤差,D參數(shù)抑制環(huán)境干擾。
溫度下降階段:制冷系統(tǒng)介入,需調(diào)整PID參數(shù)避免振蕩。
典型應(yīng)用場(chǎng)景:
快速溫變?cè)囼?yàn)(如15℃/min):需提高P和D參數(shù),增強(qiáng)動(dòng)態(tài)響應(yīng)。
高精度恒溫試驗(yàn)(±0.5℃):需優(yōu)化I參數(shù),減少穩(wěn)態(tài)誤差。
4. PID參數(shù)整定方法
試驗(yàn)箱PID參數(shù)通常通過(guò)以下方法確定:
試湊法:手動(dòng)調(diào)整、、,觀察系統(tǒng)響應(yīng)。
Ziegler-Nichols法:基于臨界比例度和振蕩周期計(jì)算初始參數(shù)。
自整定PID:現(xiàn)代試驗(yàn)箱采用自適應(yīng)算法,實(shí)時(shí)優(yōu)化參數(shù)。
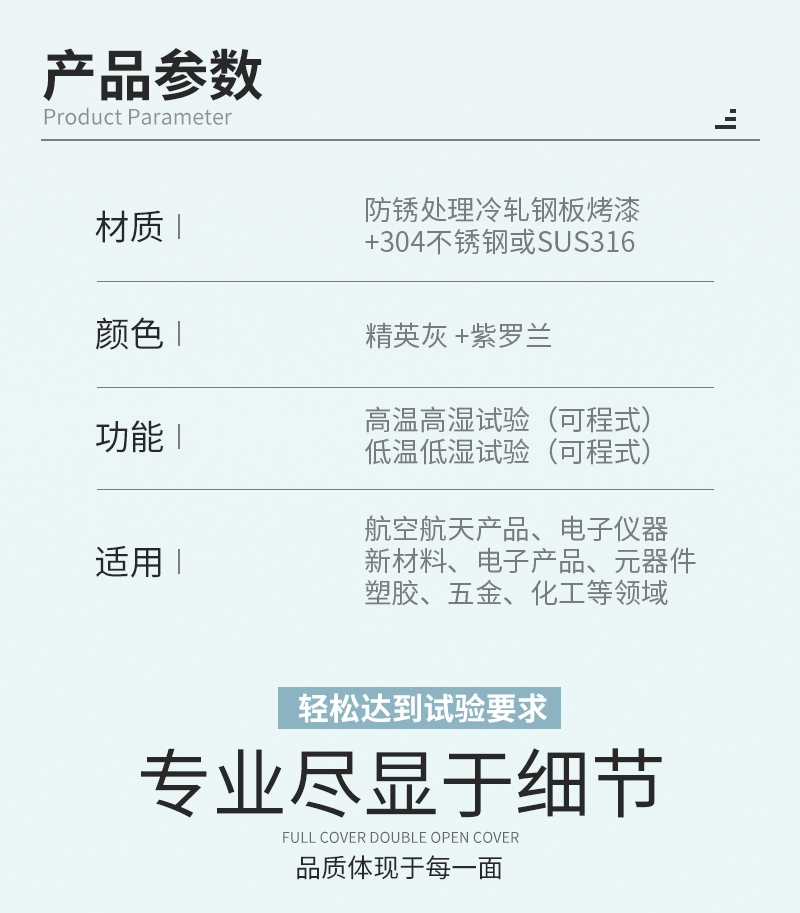
優(yōu)化案例:某型號(hào)試驗(yàn)箱在-40℃~150℃范圍內(nèi),通過(guò)自整定PID將溫度波動(dòng)從±2℃降低至±0.5℃。
5. PID算法的改進(jìn)方向
傳統(tǒng)PID在高低溫交變環(huán)境中存在局限性,常見改進(jìn)方案包括:
模糊PID:結(jié)合模糊邏輯,適應(yīng)非線性工況。
神經(jīng)網(wǎng)絡(luò)PID:利用AI動(dòng)態(tài)調(diào)整參數(shù),提升復(fù)雜環(huán)境下的控制精度。
分段PID:針對(duì)不同溫區(qū)設(shè)置獨(dú)立參數(shù),提高響應(yīng)速度。
6. 結(jié)論
PID控制算法是高低溫交變?cè)囼?yàn)箱溫度控制的核心,其參數(shù)整定直接影響測(cè)試效果。通過(guò)傳統(tǒng)PID優(yōu)化或智能控制算法改進(jìn),可進(jìn)一步提升試驗(yàn)箱的溫控精度和穩(wěn)定性。未來(lái),隨著物聯(lián)網(wǎng)和AI技術(shù)的發(fā)展,自適應(yīng)PID算法將成為高精度環(huán)境試驗(yàn)設(shè)備的主流解決方案。
相關(guān)產(chǎn)品




免責(zé)聲明
- 凡本網(wǎng)注明“來(lái)源:化工儀器網(wǎng)”的所有作品,均為浙江興旺寶明通網(wǎng)絡(luò)有限公司-化工儀器網(wǎng)合法擁有版權(quán)或有權(quán)使用的作品,未經(jīng)本網(wǎng)授權(quán)不得轉(zhuǎn)載、摘編或利用其它方式使用上述作品。已經(jīng)本網(wǎng)授權(quán)使用作品的,應(yīng)在授權(quán)范圍內(nèi)使用,并注明“來(lái)源:化工儀器網(wǎng)”。違反上述聲明者,本網(wǎng)將追究其相關(guān)法律責(zé)任。
- 本網(wǎng)轉(zhuǎn)載并注明自其他來(lái)源(非化工儀器網(wǎng))的作品,目的在于傳遞更多信息,并不代表本網(wǎng)贊同其觀點(diǎn)和對(duì)其真實(shí)性負(fù)責(zé),不承擔(dān)此類作品侵權(quán)行為的直接責(zé)任及連帶責(zé)任。其他媒體、網(wǎng)站或個(gè)人從本網(wǎng)轉(zhuǎn)載時(shí),必須保留本網(wǎng)注明的作品第一來(lái)源,并自負(fù)版權(quán)等法律責(zé)任。
- 如涉及作品內(nèi)容、版權(quán)等問(wèn)題,請(qǐng)?jiān)谧髌钒l(fā)表之日起一周內(nèi)與本網(wǎng)聯(lián)系,否則視為放棄相關(guān)權(quán)利。


 采購(gòu)中心
采購(gòu)中心