 您好, 歡迎來(lái)到化工儀器網(wǎng)
您好, 歡迎來(lái)到化工儀器網(wǎng)

產(chǎn)品分類(lèi)品牌分類(lèi)
-
西門(mén)子安裝導(dǎo)軌 西門(mén)子模塊 西門(mén)子DP接頭/插頭 西門(mén)子內(nèi)存卡 西門(mén)子PLC模塊 西門(mén)子電池/電源 西門(mén)子S7-1500 西門(mén)子S7-200模塊 西門(mén)子S7-300模塊 西門(mén)子觸摸屏 西門(mén)子變頻器 西門(mén)子S7-1200 西門(mén)子開(kāi)關(guān)量輸出模塊 西門(mén)子模擬量輸入模板 西門(mén)子網(wǎng)卡及電纜 西門(mén)子S7-400模塊 西門(mén)子400 CPU模塊 西門(mén)子400 電源模塊 西門(mén)子SMART PLC模塊 西門(mén)子電線(xiàn)電纜 西門(mén)子通信卡,網(wǎng)卡 西門(mén)子連接器
干貨分享 S7-200 SMART 運(yùn)動(dòng)控制(一)
一、運(yùn)動(dòng)控制的概述:
1、S7-200 SMART CPU 通過(guò)本體的晶體管輸出點(diǎn),實(shí)現(xiàn)運(yùn)動(dòng)軸控制:內(nèi)置于 CPU,用于速度和位置控制。
2、S7-200 SMART CPU 提供了三種開(kāi)環(huán)運(yùn)動(dòng)控制方法:運(yùn)動(dòng)控制向?qū)В琍TO(脈沖串輸出)及PWM(脈寬調(diào)制)
二、電機(jī)運(yùn)行的控制方式及框架:
PLC控制電機(jī)的兩種方式:一種是采用通信控制變頻器;另一種是高速脈沖輸出的方式控制伺服電機(jī)(此種方式只支持晶體管型CPU)

控制框架圖:有CPU發(fā)脈沖給到伺服/步進(jìn)驅(qū)動(dòng)器,通過(guò)驅(qū)動(dòng)器的控制信號(hào) 控制電機(jī)的啟停、相對(duì)定位、定位等;再通過(guò)編碼器反饋給驅(qū)動(dòng)器做半閉環(huán)控制


三、運(yùn)動(dòng)控制總覽:
S7-200 SMART 提供3個(gè)軸的開(kāi)環(huán)位置控制所需要的功能和性能:
1、提供高速控制,速度從每秒2個(gè)脈沖到每秒100,000個(gè)脈沖(2HZ到100KHZ);
2、提供可組態(tài)的測(cè)量系統(tǒng),既可以使用工程單位(例如英寸和厘米)也可以使用脈沖數(shù);
3、提供可組態(tài)的反沖補(bǔ)償;
4、支持、相對(duì)和手動(dòng)位控方式;
5、提供連續(xù)運(yùn)行操作;
6、提供多達(dá)32組移動(dòng)曲線(xiàn),每組多可有16步;
7、提供4種不同的參考點(diǎn)尋找模式,每種模式都可對(duì)起始的尋找方向和終的接近方向進(jìn)行選擇。

運(yùn)動(dòng)控制輸入/輸出定義:
四、運(yùn)動(dòng)控制向?qū)?/strong>
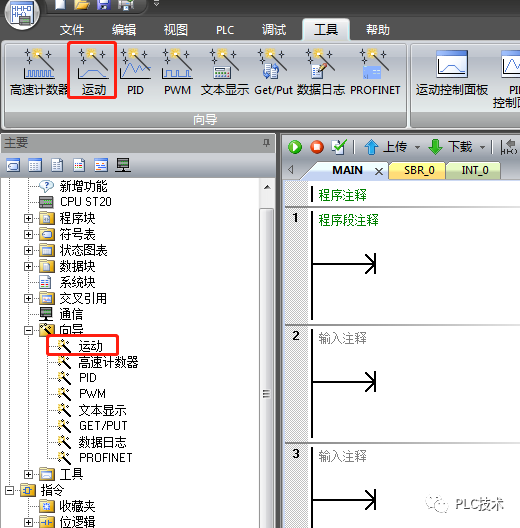
1、打開(kāi)“運(yùn)動(dòng)控制”向?qū)В?ldquo;工具”->“向?qū)?rdquo;->“運(yùn)動(dòng)控制”

2、選擇需要配置的軸

3、命名軸名稱(chēng);也可默認(rèn)不更改

4、選擇測(cè)量系統(tǒng)的方式;

(1)有工程單位和相對(duì)脈沖兩種方式
(2)指電機(jī)一圈所需要的脈沖數(shù),如是步進(jìn)電機(jī)時(shí),具體根據(jù)驅(qū)動(dòng)器的細(xì)分決定
(3)選擇工程單位時(shí),可根據(jù)實(shí)際情況選用CM、MM、M、英尺、弧度、度、英寸這幾種測(cè)量單位
(4)步進(jìn)/伺服所走一圈的距離;也就是通常提到的螺距
如選用相對(duì)脈沖上訴參數(shù)忽略
5、設(shè)置脈沖方向輸出
脈沖輸出的方式有4種
(1)單相1輸出:但發(fā)脈沖,沒(méi)有方向信號(hào);適合連續(xù)旋轉(zhuǎn)
(2)單相2輸出:P0發(fā)脈沖,P1作為方向信號(hào)(通常使用這種模式)
(3)雙相兩輸出:正反方向各一個(gè)輸出發(fā)脈沖信號(hào)
(4)AB正交相兩輸出:AB相互成90°的相位角的差動(dòng)輸出
極性選擇:正表示P1=1時(shí)正方向旋轉(zhuǎn) P1=0 時(shí)表示反方向旋轉(zhuǎn)
負(fù)表示 P1=0時(shí)正方向旋轉(zhuǎn) P1=1 時(shí)表示反方向旋轉(zhuǎn)

7、組態(tài)輸入點(diǎn):

LMT+/-表示運(yùn)動(dòng)旋轉(zhuǎn)的大極限位 ,“+”表示正方向的極限位;“-”反方向的極限位
RPS表示參考點(diǎn)信號(hào) ZP表示Z相脈沖信號(hào)
STP表示停止信號(hào)輸入點(diǎn)
TRIG表示變速信號(hào),主要用于GOTO指令的連續(xù)旋轉(zhuǎn)功能
以上輸入信號(hào)可組態(tài)I點(diǎn)的任意一個(gè),但同一個(gè)點(diǎn)不得重復(fù)定義


