 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網










| 產地類別 | 進口 | 應用領域 | 化工,電子/電池 |
|---|---|---|---|
| 產地 | 德國 | 品牌 | 西門子 |
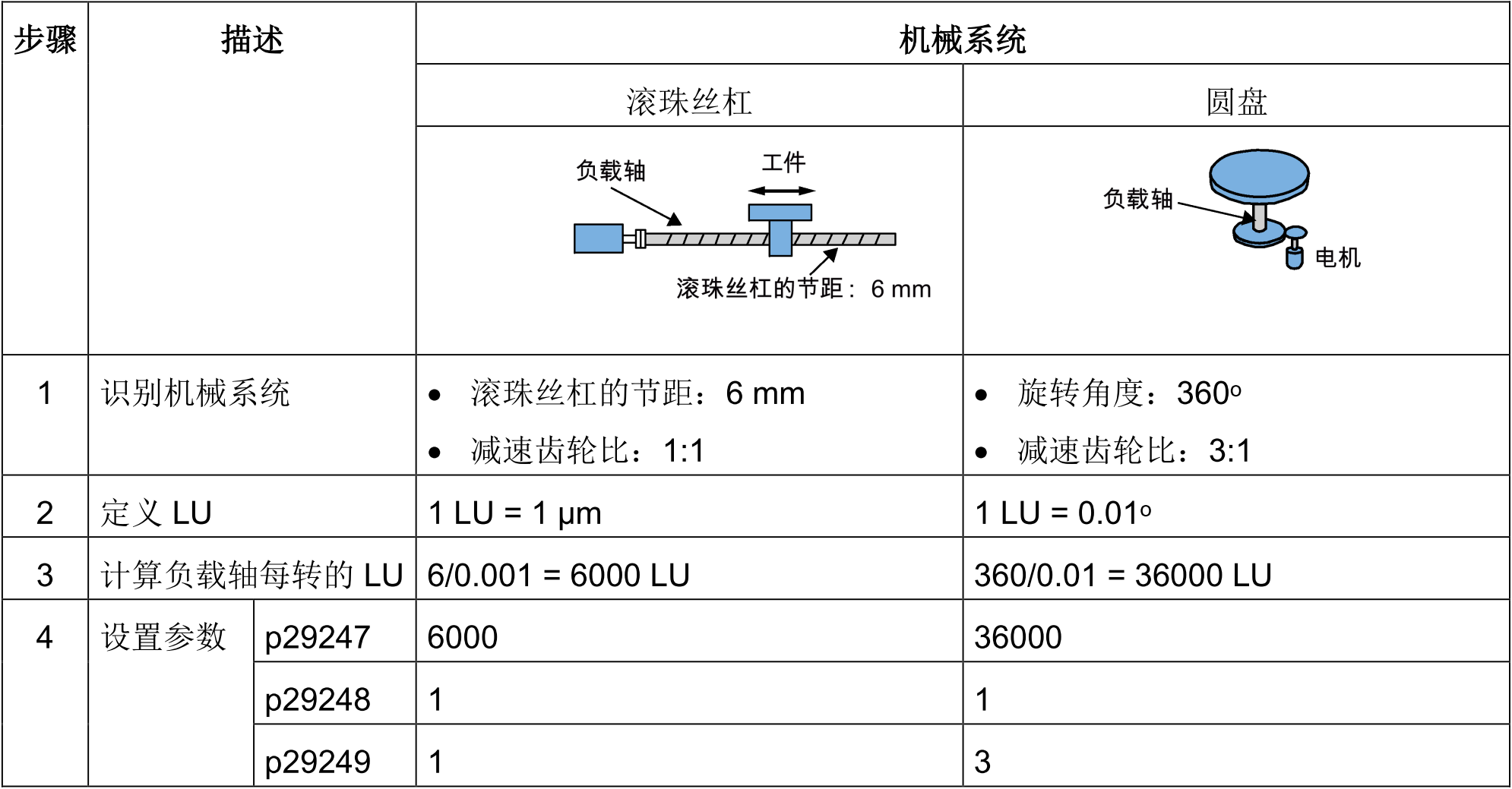
EPOS模式在驅動中的位置單位為(LU),所有的位置設定,相關速度值和加速度值以及加加速度值在EPOS模式中都以LU為單位。
P29247為負載每轉的LU值,其可以自己定義。目的是讓負載每轉的位移單位與EPOS中的LU建立關系,例如:負載每轉10mm,P29247設置為10000LU,也就是10mm=10000LU,那么設定1LU,負載會位移0.0
 |
| 參考價 | 面議 |
更新時間:2022-02-24 11:41:25瀏覽次數:369
聯系我們時請說明是化工儀器網上看到的信息,謝謝!
 |
 |
 |
 |
 |
西門子模塊6ES7522-1BL00-0AB0
 FB284怎樣實現程序塊運行控制?
FB284怎樣實現程序塊運行控制?
此程序塊運行模式通過驅動功能"Traversing blocks"來實現,它允許自動創建程序塊、運行至檔塊、設置及復位輸出。
要求:
? 運行模式選擇ModePos=6
? ConfigEpos=16#00000003
? 軸靜止
? 軸必須已回零或值編碼器已校正
步驟:
? 工作模式、目標位置及動態響應已在V90 PN驅動的運行塊參數中進行設置,輸入參數 OverV、OverAcc、OverDec 速度、加減速度的倍率,通常采取默認設置即可(*)。
? 運行條件"CancelTransing" 及 "IntermediateStop"必須設置為 "1",Jog1 及 Jog2 必須設置為 "0"
? 程序塊號在輸入參數 "Position" 中設置,取值應為 0~ 16
? 運動的方向由與工作模式及程序塊中的設置決定,與Positive 及Negative參數無關,必須將它們設置為"0"。
? 驅動的運行命令AxisEnable=1
選擇程序塊號后通過Execute Mode的上升沿來觸發運行。
FB284怎樣實現點動"Jog"控制?
點動運行模式通過驅動的"Jog"功能來實現。
要求:
? 運行模式選擇ModePos=7
? ConfigEpos=16#00000003
? 軸靜止
? 軸不必回零或值編碼器校正
步驟:
? 點動速度在V90 PN中設置,速度的OverV參數對于點動速度設定值進行倍率縮放,建議使用默認值*
? 運行條件"CancelTransing" 及 "IntermediateStop"與點動運行模式無關,默認設置為 "1"
? 驅動的運行命令 AxisEnable=1
? 給出jog1或jog2信號
注意:
? Jog1 及Jog2 用于控制EPOS的點動運行,運動方向由V90 PN驅動中設置的點動速度來決定,默認設置為Jog1 = 負向點動速度,Jog2 = 正向點動速度 ,與Positive 及Negative參數無關,默認設置為"0"。
EPOS模式下機械參數如何設置?

EPOS模式在驅動中的位置單位為(LU),所有的位置設定,相關速度值和加速度值以及加加速度值在EPOS模式中都以LU為單位。
P29247為負載每轉的LU值,其可以自己定義。目的是讓負載每轉的位移單位與EPOS中的LU建立關系,例如:負載每轉10mm,P29247設置為10000LU,也就是10mm=10000LU,那么設定1LU,負載會位移0.001mm(=1um)
相關參數:

西門子模塊6ES7522-1BL00-0AB0
射頻輻射干擾射頻輻射干擾來自變頻器的輸入電纜和輸出電纜。變頻器的輸入輸出電纜上有射頻干擾電流時,由于電纜相當于天線,必然會產生電磁波輻射,產生輻射干擾。
觸摸屏是人們對"帶觸摸功能人機界面"的通俗叫法!真正的觸摸屏是"可以用手觸摸操作的一塊透明玻璃"而已!可以用來替代鼠標修改人機界面相關知識,什么是人機界面人機界面HMI基本概念和問題一人機界面HMI產品基本常識人機界面產品的定義連接可編程序控制器PLC變頻器直流調速器儀表等工業控制設備,利用顯示屏顯示,通過輸入單元如觸摸屏鍵盤鼠標等寫入工作參數或輸入操作命令,實現人與機器信息交互的數字設備,由硬件和軟件兩部分組成。

經過多次觀察發現是在充電電阻短路接觸器動作時出現的。懷疑是接觸器造成的干擾,在控制腳加上阻容濾波后果然故障不再發生了。一臺富士E系列千瓦變頻器,在現場運行中突然出現OC恒速中過流報警停機,斷電后重新上電運行出現OC加速中過流報警停機。我先拆掉UVW到電機的導線,用萬用表測量UVW之間電阻無窮大,空載運行,變頻器沒有報警,輸出電壓正常。可以初步斷定變頻器沒有問題。原來是電機電纜的中部有個接頭,用木版蓋在地坑的分線槽中,絕緣膠布老化,工廠打掃衛生進水,造成輸出短路。
西門子6AU1435-2AA00-0AA0設置參數 USS協議使用CPU的下列資源: 1)USS協議占用PLC的通訊端口0或1,使用USS——INIT指令可以選擇PLC的端口是使用USS協議還是PPI協議,選擇USS協議后PLC的相應端口不能在做其它用途,包括與STEP7-WICRO/WIN32的通訊,只有通過執行另外一條USS指令或將PLC——CPU的模式開關撥到RUN或STOP狀態,才能鐘新在進行PPI通訊,當PLC和與變頻器通訊中斷時,變頻器將停止運行,所以在本例中選擇CPU226 因為它有兩個通訊端口,當***個口用于USS通訊時,***個端口可以用于程序監控,USS指令要占用2300~3600字節的程序存儲空間和400個字節的變量存儲區間