 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網










| 產地類別 | 進口 | 應用領域 | 化工,電子/電池 |
|---|---|---|---|
| 產地 | 德國 | 品牌 | 西門子 |
故障安全型數字量輸入模塊適用于連接:
開關以及2線制接近開關(BERO)
NAMUR傳感器和機械觸點以及危險區域信號
該模塊作為集中式與SIMATIC S7-31xF-2DP一起使用,并可在ET200M分布式I/O站中與 SIMATIC IM 151-7 F-CPU,S7-31xF-2 DP、S7-416F-2 和 S7-400F/FH 一起使用。
 |
| 參考價 | 面議 |
更新時間:2022-02-24 11:41:25瀏覽次數:320
聯系我們時請說明是化工儀器網上看到的信息,謝謝!
 |
 |
 |
 |
 |
西門子6ES7590-1AB60-0AA0
PLC主要有整體式和模塊式兩種結構型式。 整體式PLC的每一個I/O點的平均價格比模塊式的便宜,且體積相對較小,一般用于系統工藝過程較為固定的小型控制系統中;而模塊式PLC的功能擴展靈活方便,在I/O點數、輸入點數與輸出點數的比例、I/O模塊的種類等方面選擇余地大,且維修方便,一般于較復雜的控制系統。
二、安裝方式的選擇
PLC系統的安裝方式分為集中式、遠程I/O式以及多臺PLC聯網的分布式。
集中式不需要設置驅動遠程I/O硬件,系統反應快、成本低;遠程I/O式適用于大型系統,系統的裝置分布范圍很廣,遠程I/O可以分散安裝在現場裝置附近,連線短,但需要增設驅動器和遠程I/O電源;多臺PLC聯網的分布式適用于多臺設備分別獨立控制,又要相互聯系的場合,可以選用小型PLC,但必須要附加通訊模塊。
三、相應的功能要求
一般小型(低檔)PLC具有邏輯運算、定時、計數等功能,對于只需要開關量控制的設備都可滿足。
對于以開關量控制為主,帶少量模擬量控制的系統,可選用能帶A/D和D/A轉換單元,具有加減算術運算、數據傳送功能的增強型低檔PLC。對于控制較復雜,要求實現PID運算 、閉環控制、通信聯網等功能,可視控制規模大小及復雜程度,選用中檔或高擋PLC。但是中、高擋PLC價格較貴,一般用于大規模過程控制和集散控制系統等場合。
(1)參數設置錯誤,變頻器內部所設置的參數需要與所驅動的電機相匹配,如變頻器參數設置不當或是設置錯誤將會導致變頻器無法正常啟動。但是在無線電頻率資源中,由于無線電頻率資源有限,在不同區域被反復復用的現象很常見,這又造成了相鄰區域頻率共用現象,于是形成同頻干擾
(2)互調干擾指不同頻率的信號在非線性電路中產生與有用信號頻率*或相鄰的無用信號。 嚴格按照相關規定運營,后,電信運營商要做好核查,保證網內的無線電發射設備參數正常,杜絕大功率無繩電話的使用,發現問題及時整改,3.3完善無線電監測和測向網絡干擾源的定位查找是以完善的監測和測向網絡為支撐的。
進而導致整個系統的電壓紊亂,在這種情況下,電動機,大功率開關等設施都處于極不穩定的情況,而相對的電網產生的干擾信號卻極其強烈,此時電源會發生突然短路的情況,同時伴隨著電壓的不穩定進而使整個系統都處于無法正常運轉的情況。
總結了在公路施工中機電一體化系統存在的干擾源,,施工過程中會存在供電干擾,供電干擾在公路施工機電一體化當中所占的概率,其容易出現此種干擾現象,產生這種干擾的原因主要是大功率設備在機電一體化系統當中的普遍使用使電網受到不同程度的影響。
PLC控制系統的各類信號傳輸線除了傳輸各種有效的信息外,還傳輸著外部的干擾信號。主要是信號線受空間電磁輻射感應的干擾,這是很嚴重的。由信號引入干擾會引起I/O信號異常,大大降低測量精度,嚴重時將引起元器件損傷。隔離性能差的系統,將導致信號間互相干擾,引起共地系統總線回流,造成邏輯數據變化、誤動和死機。實際生產過程中,PLC控制系統因信號引入干擾造成I/O點損壞的情況相當嚴重,由此引起系統故障。
輸入通道中的檢測信號一般較弱、傳輸距離較長,使現場干擾和電路結構模數混雜等因素很容易進入通道。保護方法可在輸入端外加一級光電耦合器,一旦有高壓電壓等侵入回路時,使其擊穿保護級光耦,可保護回路。
造成此類故障的原因主要是由于西門子變頻器在使用的過程中出現多次過載或是西門子變頻器長時間處于電壓波動較大的情況,模擬地線,噪聲地線以及儀器機殼的屏蔽地線等,這些地線應該分開布置,并在一點上與電源地相連。
與手段相比,管理手段是一種較為經濟和有效的防范措施,并且是一種根本的解決方案,首先,相關部門要制定完善的法律法規,加強對無線電頻率的保護,其次,要求相關設臺單位加強自我管理,加強法規建設和宣傳教育。
PLC控制系統的地線包括系統地,屏蔽地,交流地和保護地等,由于各個接地點電位分布不均,不同接地點間存在電位差而引起地環路電流,影響系統正常工作,若系統地與其它接地處理混亂,所產生的環路電流就可能在地線上產生電位分布,影響邏輯電路和模擬電路的正常工作,嚴重的造成系統癱瘓。
電磁波和電磁輻射等等可能影響到系統正常運轉的圍在于其周圍的無形的[場",由于這些[場"無形的存在于系統的周圍,因此很容易通過電源,傳輸線路等侵入系統,進而影響系統的正常運轉,三,公路施工中機電一體化的抗干擾措施機電一體化系統在公路施工中的運用如果要達到更佳的效果。
3無線電波特性和頻譜管理3.1完善無線電干擾查找流程解決無線電干擾問題的前提是找出干擾源,因此要對無線電干擾源進行查找,無線電干擾查找步驟可簡單概括為:一聽,二看,三算,四跟,五測,聽是指,即通過用耳朵判斷某些特定頻段的干擾是否存在。
西門子6ES7590-1AB60-0AA0
![]()
故障安全型數字量輸入模塊適用于連接:
該模塊作為集中式與SIMATIC S7-31xF-2DP一起使用,并可在ET200M分布式I/O站中與 SIMATIC IM 151-7 F-CPU,S7-31xF-2 DP、S7-416F-2 和 S7-400F/FH 一起使用。它們也可以使用在非安全的標準模式下,并可像標準S7-300模塊進行響應。
![]()
故障安全型數字量輸入模塊具有以下機械特點:
注意:
在危險區域運行 6ES7 326-1RF00-0AB0 故障安全數字量輸入模塊時需要電纜 6ES7 393-4AA10-0AA0。
![]()
故障安全型數字量輸入模塊把從過程發送來的外部數字信號電平轉換成SIMATIC S7 CPU內部信號電平。
安全功能所需的故障安全操作集成在模塊中。
S7-200與V20的USS通訊
1、本例程的系統配置:
(1)安裝Step7 Micro/Win V4.0 SP6軟件和USS協議V2.3,軟件下載地址:
(2)PC/PPI電纜、S7-200、電源模塊、通信電纜。
(3)V20驅動裝置和一臺PC機。
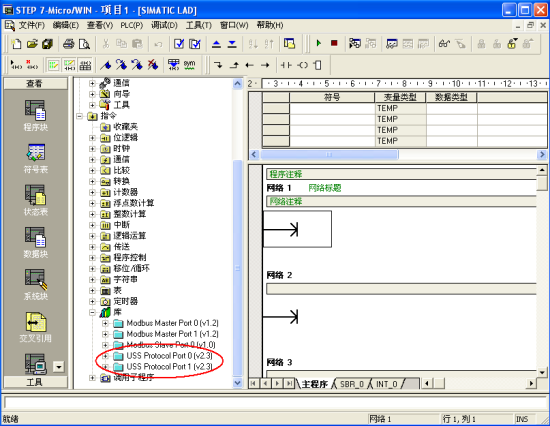
2、在使用MicroWin software 創建項目之前,確認USS庫文件已經安裝:
3、創建一個例程:
3.1 設置通訊接口
本例程使用PC/PPI電纜。

3.2 建立PC和PLC之間的連接
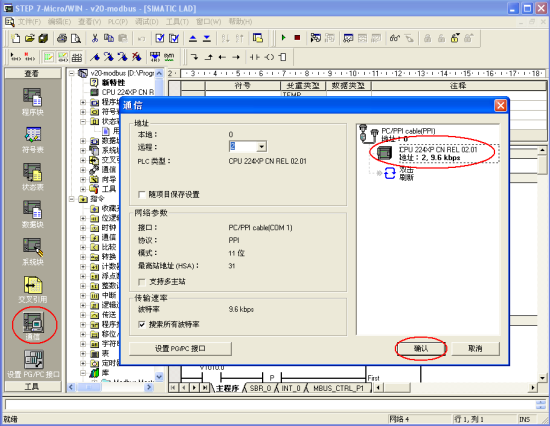
“雙擊刷新”搜索到PLC后,點擊”確認”。
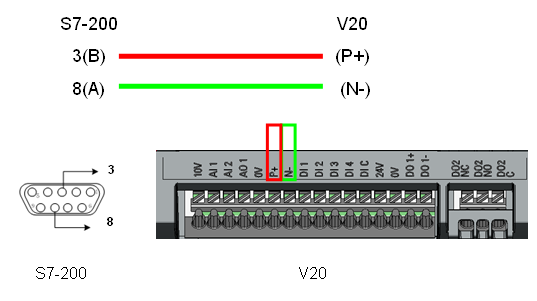
3.3 用電纜將S7-200 Port 0端口與V20的RS485接口相連(注意端口連接規則:V20的
P+對3、N-對8),如下圖所示:
3.4 變頻器參數設置:
V20 可以通過選擇連接宏Cn010實現USS控制,也可以通過直接更改變頻器參數的方法來實現。參數設置如下表所示:
表一:
| 參數 | 描述 | Cn010默認值 | 實際設置 | 備注 |
| P0700[0] | 選擇命令源 | 5 | 5 | RS485為命令源 |
| P1000[0] | 選擇頻率 | 5 | 5 | RS485為速度設定值 |
| P2023 | RS485協議選擇 | 1 | 1 | USS協議 |
| P2010[0] | USS/MODBUS波特率 | 8 | 6 | 波特率為9600bps |
| P2011[0] | USS地址 | 1 | 3 | 變頻器的USS地址 |
| P2012[0] | USS PZD長度 | 2 | 2 | PZD部分的字數 |
| P2013[0] | USS PKW長度 | 127 | 127 | PKW部分字數可變 |
| P2014[0] | USS/MODBUS報文間斷時間 | 500 | 0 | 接收數據時間 |
3.5 使用USS協議的初始化模塊初始化S7-200的PORT0端口:
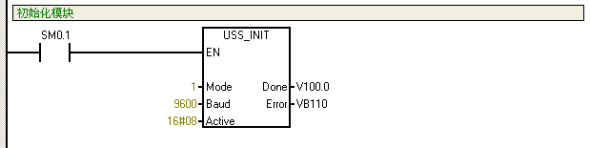
EN使能:每次改變通訊狀態都應該執行一次初始化指令。所以EN信號應該通過邊沿檢測元件脈沖激活。
Mode:用這個USS輸入值選擇通訊協議。
1:為端口0USS協議,并啟用該協議。
0:為端口0PPI協議,并禁止USS協議。
Baud: 波特率:9600,19200…115200。
Active:激活驅動地址。
Done:當USS_INIT 指令執行完成后,Done=1。
Error:指令執行的結果,如果有錯誤,顯示錯誤代碼。
Active:激活驅動地址舉例:

3.6 使用USS——CTRL模塊來控制USS地址為3的變頻器,為了運行變頻器需要按照表一設置參數:

狀態表:

功能塊定義:
EN:通常情況總是激活。
RUN:指示驅動為啟用(1),或禁止(0)。
OFF2:允許V20自由停車。
OFF3:允許V20快速停止。
F _ACK:V2*復位。
DIR:V20轉動方向(0:逆時針;1:順時針)。
Drive:V20地址 0-31。
Speed:速度給定值,以全速的百分比給出 (-200.0~~200.0%,負值時,V20反向)。
Resp_R:輪詢V20,掃描時=1,并更新下面值。
Error:錯誤字節,參見表:USS指令執行錯誤。
Status:V20返回狀態值。
Speed:V20速度,(-200.0~~200.0%)。
Run_EN:V20運行狀態(1:運行;0:停止)。
D_DIR:V20轉動方向(0:逆時針;1:順時針)
Inhibit:V20禁止位狀態。 (0:啟用;1:禁止)。要清除禁止位,必須將Fault清零,
RUN,OFF2, OFF3輸入也要清零。
Fault:指示故障狀態。根據V2*表確認故障。故障排除后,置位F _ACK使Fault
清零。
表二:Error 信息
| Error代碼 | 說明 |
| 0 | 沒有錯誤 |
| 1 | 驅動未響應 |
| 2 | 檢測到驅動響應中存在校驗和錯誤 |
| 3 | 檢測到驅動響應中存在奇偶校驗錯誤 |
| 4 | 由于用戶程序干擾導致出錯 |
| 5 | 嘗試執行了無效命令 |
| 6 | 提供的驅動地址無效 |
| 7 | 該通訊接口不能實現USS協議 |
| 8 | 該通訊接口正在忙于處理指令 |
| 9 | 驅動速度輸入溢出 |
| 10 | 驅動響應的長度不正確 |
| 11 | 驅動響應的首字符不正確 |
| 12 | 驅動響應的長度字符不正確 |
| 13 | 驅動響應錯誤 |
| 14 | 給出的DB_PTR地址不正確 |
| 15 | 給出的參數號不正確 |
| 16 | 選擇了無效的協議 |
| 17 | 啟用USS:不允許更改 |
| 18 | 了無效的波特率 |
| 19 | 無通訊:驅動未激活 |
| 20 | 驅動響應中的參數或值不正確 |
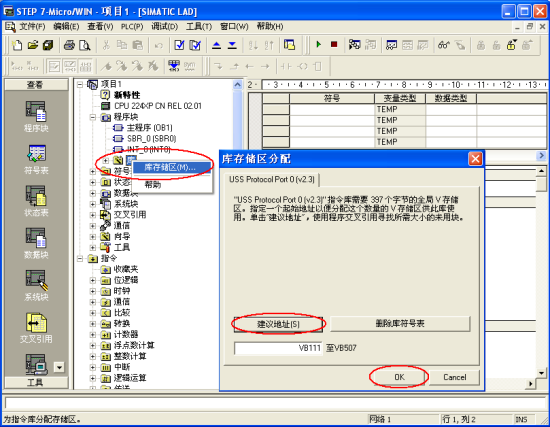
3.7 庫存儲區分配:在編譯程序之前,選擇 “程序塊” ->“ 庫” 右鍵,選擇“庫存儲區”。在點擊 “建議地址” 選擇V存儲區的地址后點擊 “OK”退出。
3.8 讀寫U16類型參數:
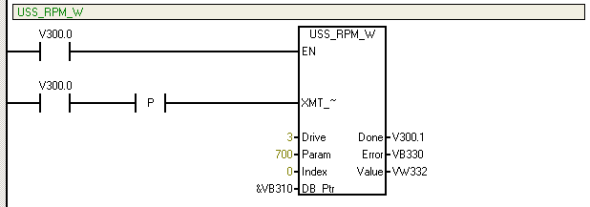
3.81舉例:使用USS_RPM_W讀取參數P0700的值;
狀態表:

注意:
(1)讀參數P0700,其數據類型為U16無符號整數。
(2)只要給V300.0一個上升沿,就完成一次P0700參數的讀操作。
(3)讀入的參數被放在VW332里。
(4)需要注意的是Index為0時代表讀Pxxx.0參數組
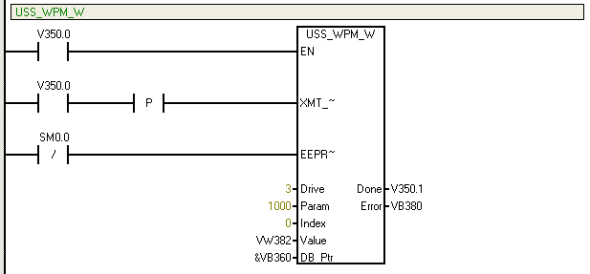
3.8.2 舉例:使用USS_RPM_W設置參數P1000。
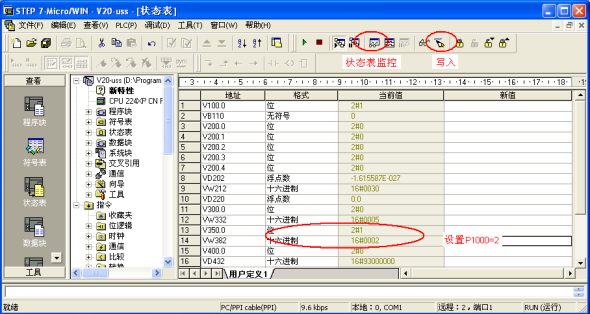
狀態表:
注意:
(1)寫參數P1000,其數據類型為U16無符號整數。
(2)只要給V350.0一個上升沿,就完成一次P1000參數的寫操作。
(3)EEPR~的邏輯為0時,寫入的值只保存到RAM中,為1時,寫入得值保存到EEPROM。
(4)EEPROM中寫數據是有次數限制的,V20*多不超過50000次。
3.9 讀寫U32類型參數:
3.9.1舉例:使用USS_RPM_D讀取參數P0771.In000的值;
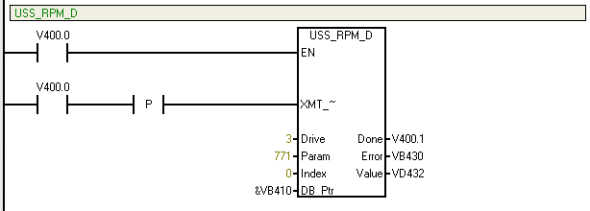
狀態表:
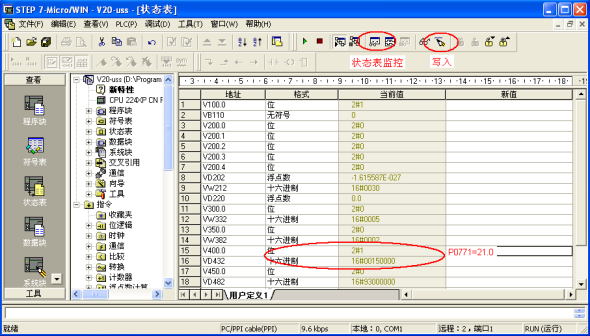
注意:
(1)讀參數P771,其數據類型為U32無符號整數。
(2)只要給V400.0一個上升沿,就完成一次P771參數的讀操作。
(3)讀入的參數被放在VD432里。16#00150000=21.0。
(4)需要注意的是Index為0時代表讀Pxxx.0參數組。
3.9.2 舉例:使用USS_WPM_D設置參數P0771.In000
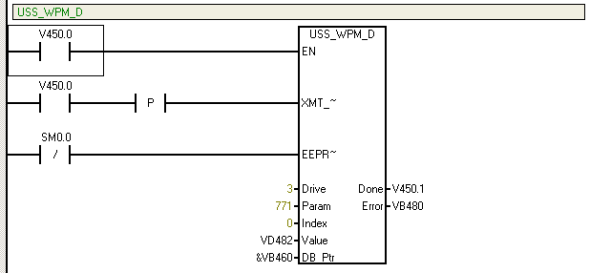
狀態表:

注意:
(1)寫參數P771,其數據類型為U32無符號整數。
(2)只要給V450.0一個上升沿,就完成一次P771參數的寫操作。
(3)EEPR~的邏輯為0時,寫入的值只保存到RAM中,為1時,寫入得值保存到EEPROM。
(4)EEPROM中寫數據是有次數限制的,V20*多不超過50000次。
3.10讀寫Float類型參數:
3.10.1舉例:使用USS_RPM_R讀取參數P0305.In001的值;
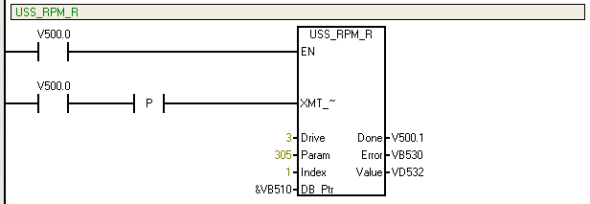
狀態表:

注意:
(1)讀參數P0305.In001,其數據類型為浮點數。
(2)只要給V550.0一個上升沿,就完成一次P0305.In001參數的讀操作。
(3)讀入的參數被放在VD532里。
(4)需要注意的是Index為1時代表讀Pxxx.1參數組。
3.10.2舉例:使用USS_WPM_R設置參數P0305.In001=1.5A
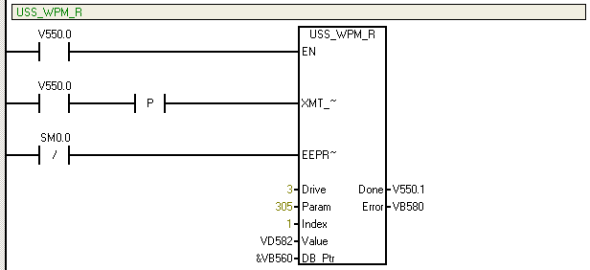
狀態表:
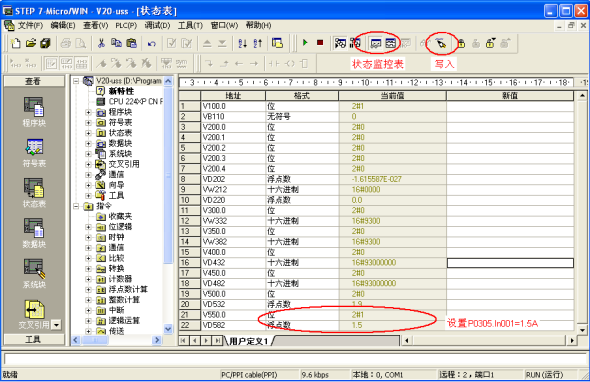
注意:
(1)寫參數P0305.In001,其數據類型為浮點數。P0305更改條件:P0010=1快速調試。
(2)只要給V550.0一個上升沿,就完成一次參數P0305.In001的寫操作。
(3)EEPR~的邏輯為0時,寫入的值只保存到RAM中,為1時,寫入得值保存到EEPROM。
(4)EEPROM中寫數據是有次數限制的,V20*多不超過50000次